















人形机器人技术突破与先楫半导体HPM6E00系列高性能MCU芯片的适配性
2024-10-28
浏览量:
3600

1
前言

2
人形机器人核心技术难点
1. 动态平衡与高级控制算法

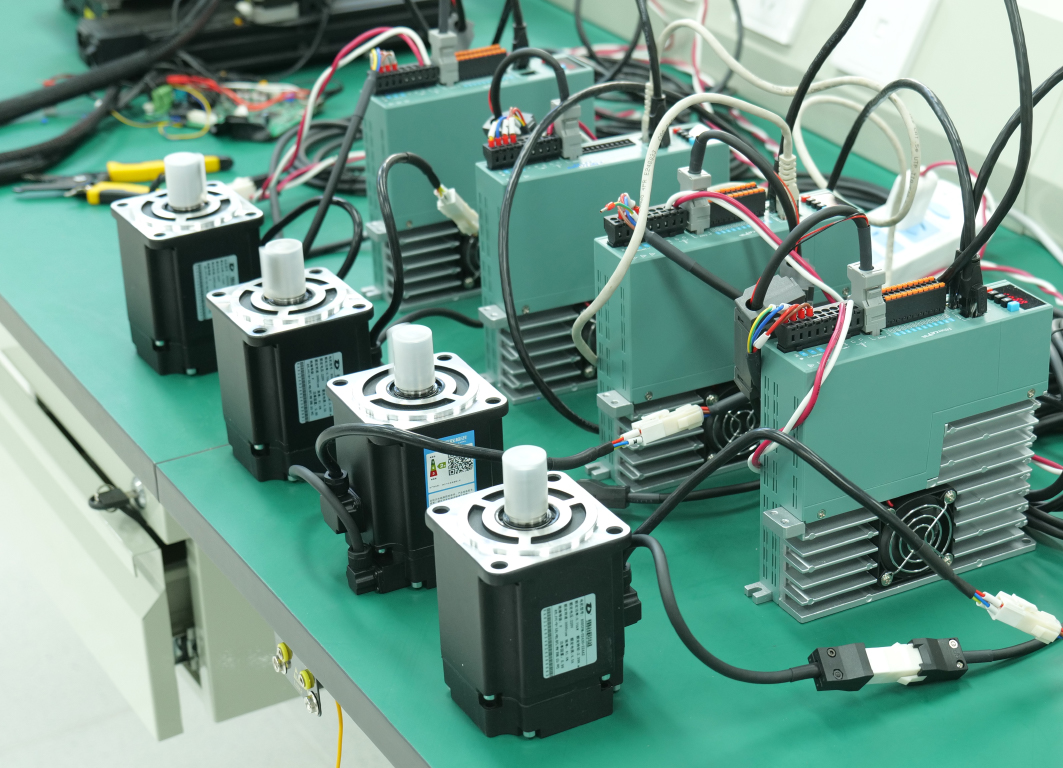
2. 传感器集成与实时反馈
为了实现精准控制,人形机器人需要集成大量的传感器,包括惯性测量单元(IMU)、力传感器、位置传感器、加速度计和陀螺仪等。这些传感器的数据需要快速传输到主控芯片,并由芯片通过高级算法进行计算和处理。

3. 人工智能与机器学习

3
先楫半导体 HPM6E00 系列芯片的应用优势
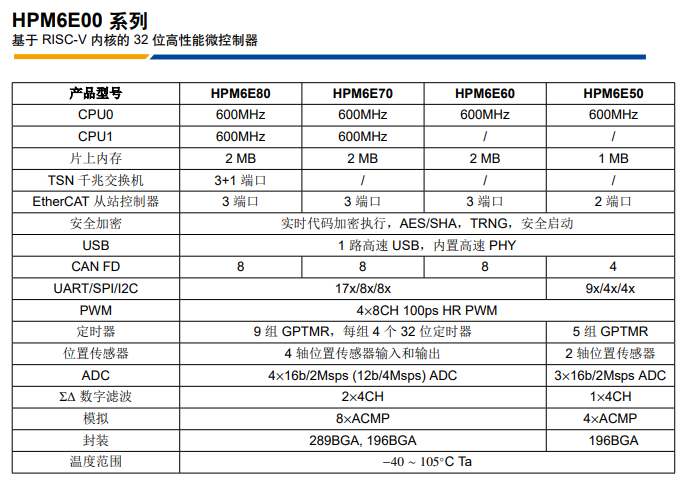
1. 体积小,BGA封装

2. 丰富的性能支持高级控制算法
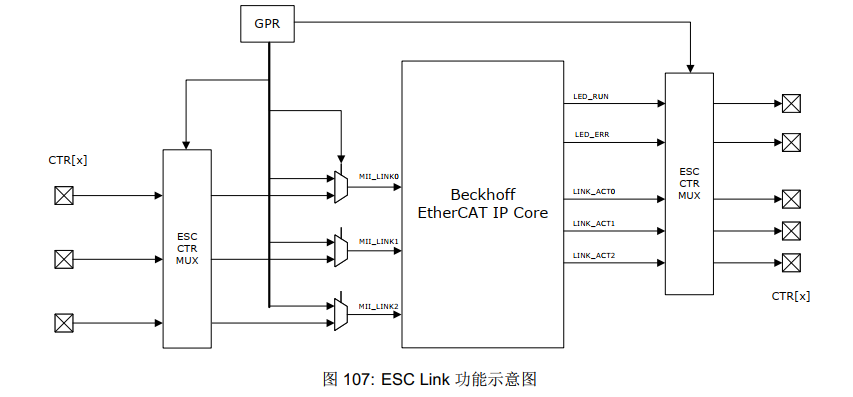
3. EtherCAT 接口与 TSN(时间敏感网络)支持
4. 多路 CANFD 接口
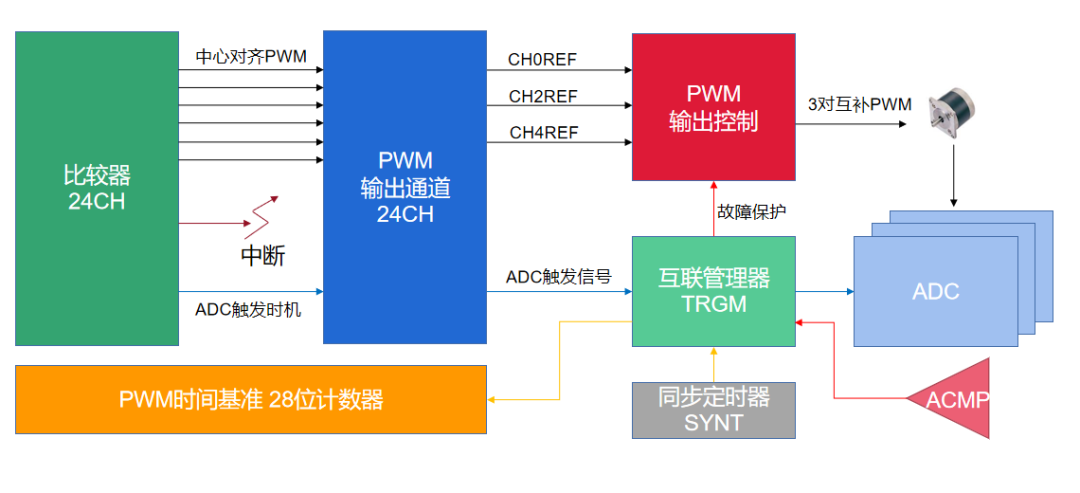
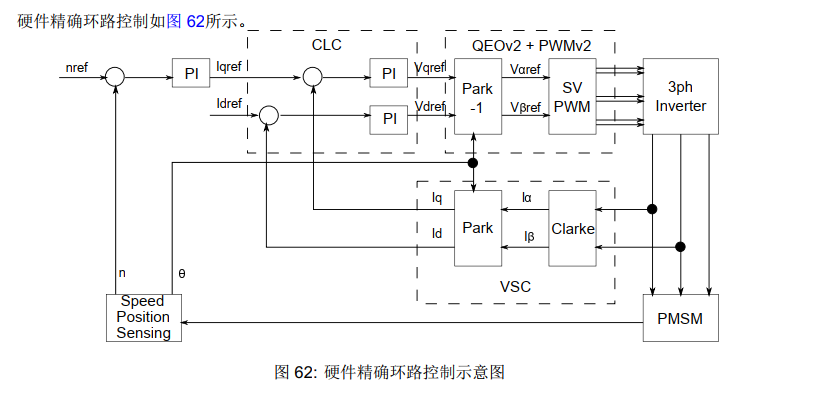
5. 硬件电流环与编码器数据处理
4
总结
